
Avionics, Avionics & Instruments, EFIS, MGL

SP-6, MGL MAGNETOMETER
Part #: SP-6
SP6
R$2,926.59
CompararOverview
| The SP-6 magnetometer is a three axis, tilt compensated electronic compass system. It outputs magnetic heading information. In the case of a standalone SP-6, tilt compensation is performed by deriving the attitude of the SP-6 sensor using on-board accelerometers which are used to vector the direction of gravity. The magnetic field is measured using three magnetometers which are mounted perpendicular to each other resulting in three magnetic force vectors.
Using three magnetic force vectors and knowledge of attitude allows calculation of magnetic heading even if the SP-6 is not horizontal. if you have a SP-7 AHRS connected to the same Airtalk bus as the SP-6, the SP-6 will use the attitude data from the SP-7 to calculate the heading. If your SP-6 is set to gyro mode and horizon data is being received, your SP-6 will use the gyro derived horizon rather than the built in accelerometers for tilt compensation. In this case, heading is correct even during turns. |
| Peso | 0.91 lbs |
|---|---|
| Brands |
Specifications
- Weight:
Excluding cables: 126 grams
Including cables: 175 grams (RCA signal and DB9 power cable included) - Electrical and Temperature Characteristics:
Input voltage range: 8V to 20V DC regulated preferred for maximum performance.
11-14V is suggested as operating voltage.
Current consumption: 50 mA (heater off) at 13.8VDC input voltage
120 mA (heater on) at 13.8VDC input voltage
Temperature Regulation: 35ºC (internally maintained temperature) - Accelerometer Specifications
Accelerometers: MEMS
Sensor Limits: +/- 8G
Maximum G-force loading: 30G (any axis) - Output Messages
Interface: MGL Avionics Airtalk compatible
Normal output message: 50 ms (average) latency
Raw output message: 12 ms (average) latency - Magnetic sensors
Sensor type: Magnetoresistive, three axis
Measurement headroom: 3:1 based on field strength at magnetic equator
Accuracy: +/-1.5º typical, sensor horizontal, clean field
Tilt compensation: Accelerometers or external gyro derived horizon
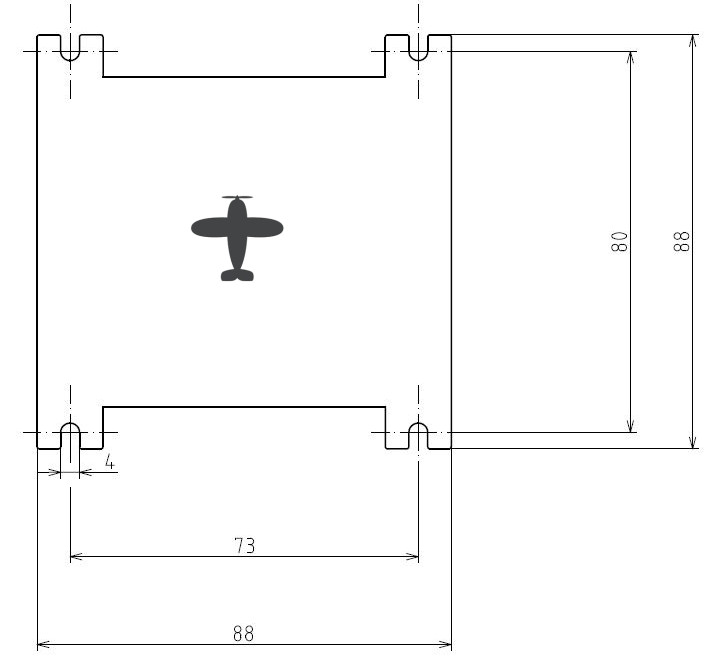
Drawing




Não há avaliações ainda.